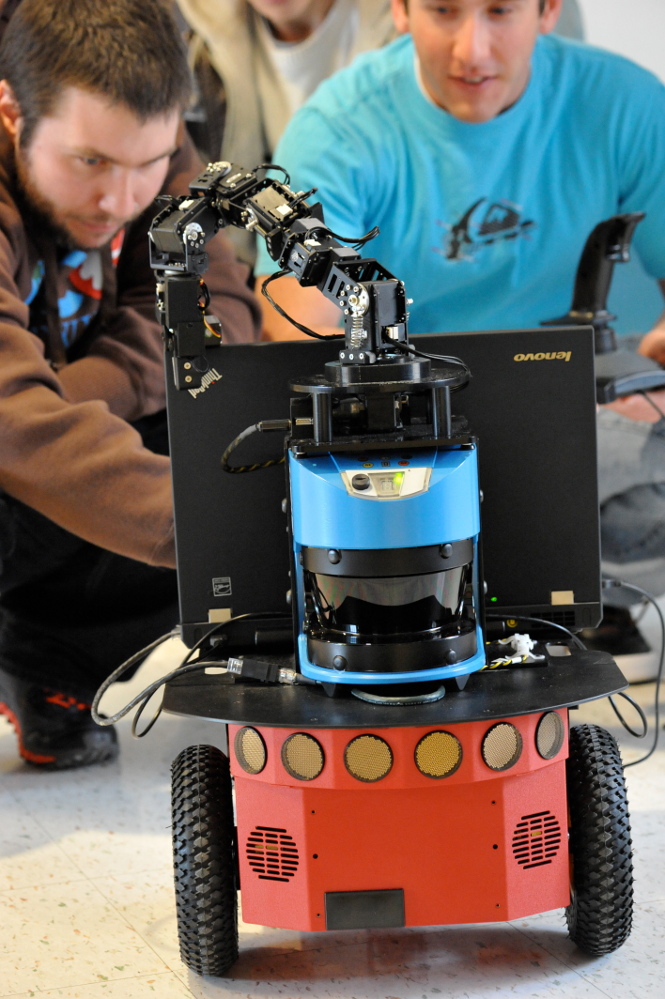
| Some of our work uses physical robots, equipped with SICK lidars, RGBD cameras, and 7 DOF arms. |
|
| Some of our work uses simulated or video-game worlds. Here's an example of a UNH-developed heuristic search algorithm (Bugsy) guiding a video-game agent quickly to a goal. A* takes a long time to find an "optimal" plan and Speedy very quickly finds a very long plan. Bugsy explicitly optimizes the total (planning + plan execution) time to the goal. | |
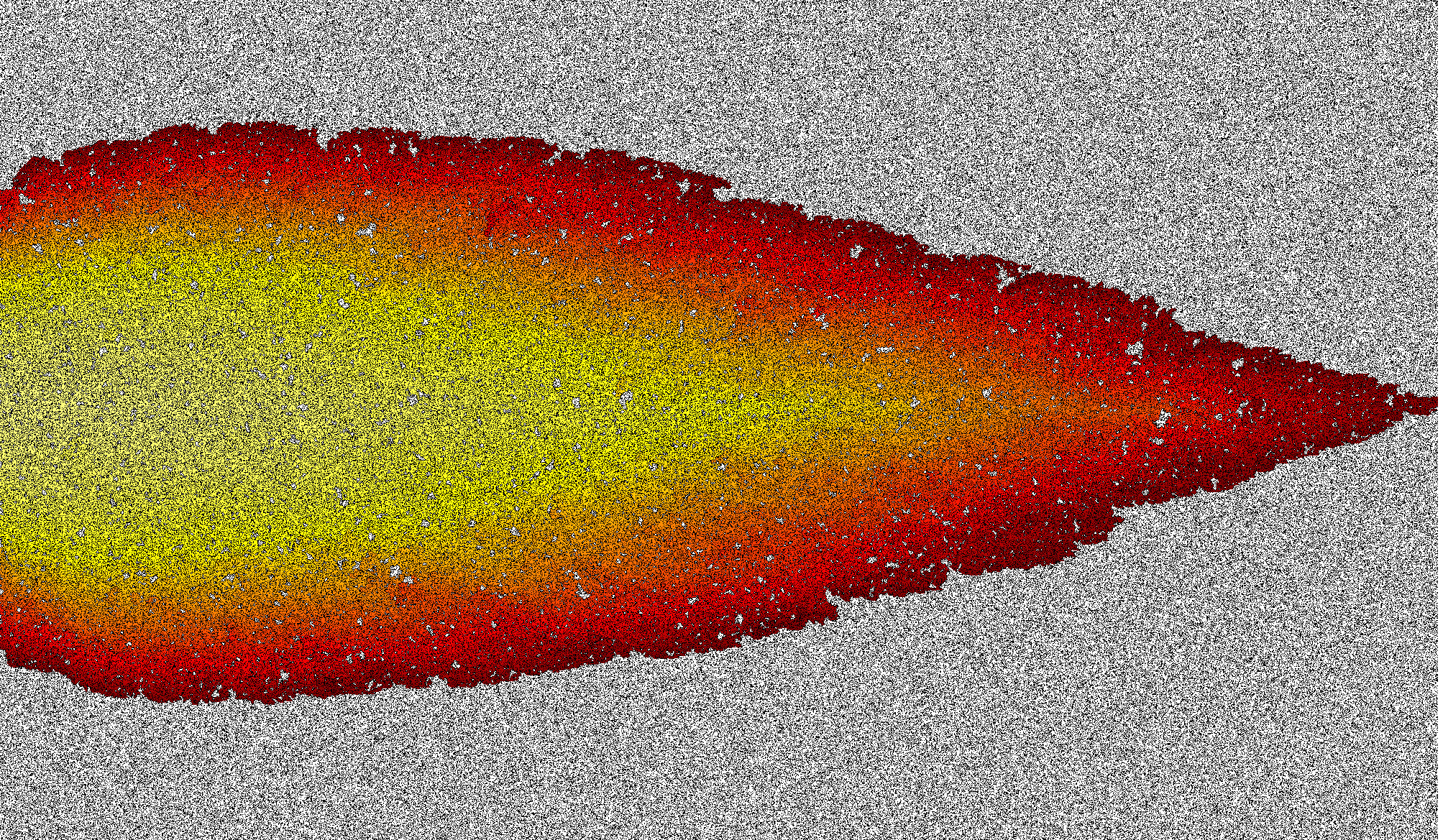
| Here's a visualization of A* search solving a video-game-style pathfinding problem. The colors correspond to the time a map cell was visited during the search. |
|
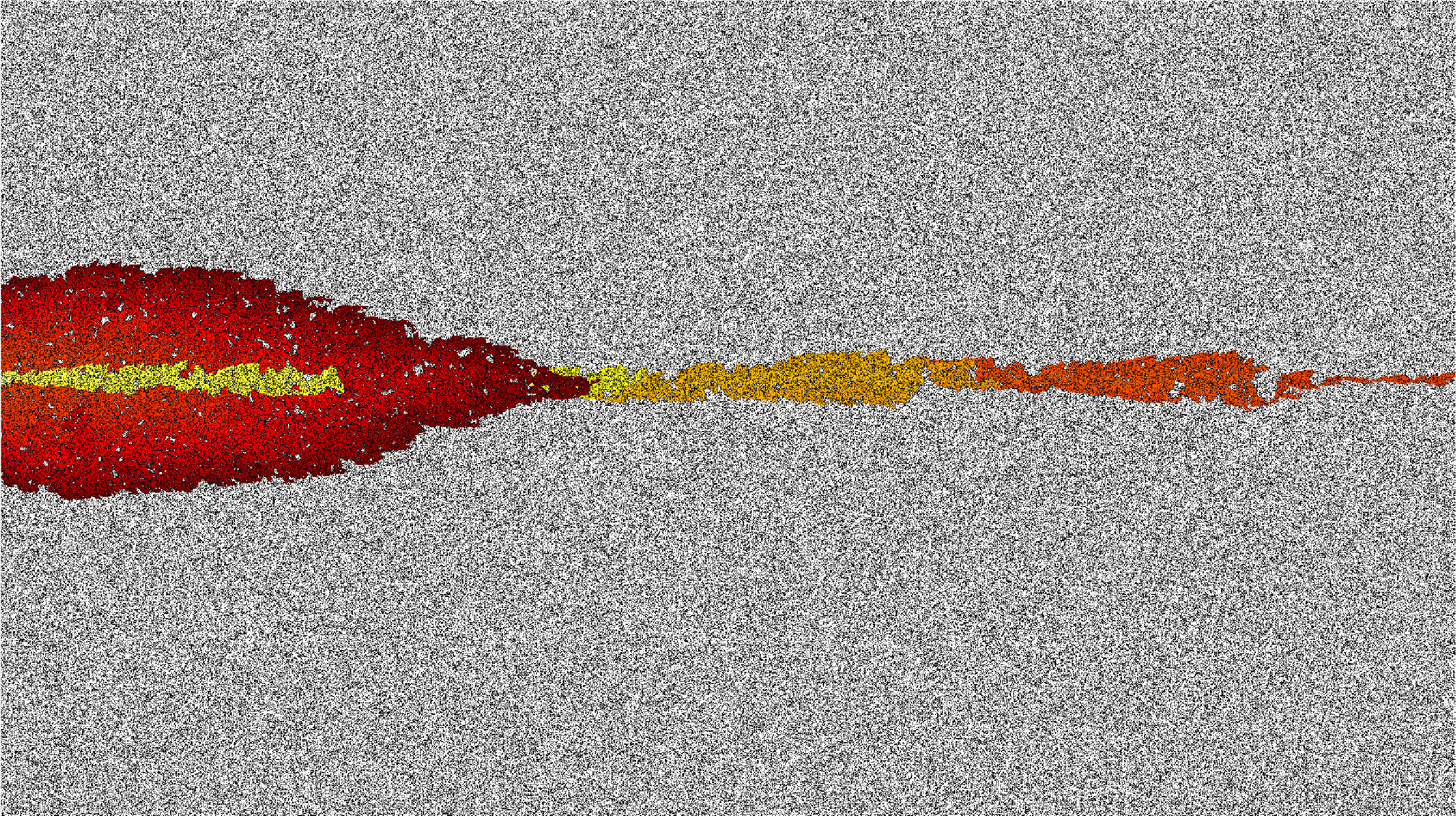
| Here's a UNH-developed search algorithm (Optimistic Search) solving the same kind of problem. You can easily see that it's much faster than A* and touches many fewer cells in the map. Yet we can still prove strict bounds on the cost of the solution that it returns! |
|
More information about the group is available at the UNH AI wiki. More information about robotics at UNH more generally is available here.